
 Home
Home Teacher login
Teacher login


Research on the point-by-point construction-iteration (CI) method for designing freeform imaging systems
Traditional design method of freeform imaging systems is to find existing patents or other available systems as the starting point. Then, further optimization with optical design software is applied to obtain the final design result. However, as the freeform surfaces are generally used in the off-axis or unobscured forms, there are few existing patents or systems for choice. Moreover, the system configuration, the number of elements, and the system specifications (such as the field-of-view (FOV), the F-number and the focal length, etc.) of the existing systems are generally not consistent with the expect specifications of the current design. Therefore, designers may fail to find useful solutions, or they have to spend long times improving the starting point. Consequently, some direct design methods for freeform surfaces have been developed. In these methods, the points on the freeform surfaces are calculated and then the freeform surfaces are obtained through surface fitting. The systems generated by these methods can be taken as starting point for further optimization. However, these methods have a restriction on the number of field points considered in the design process (or sometimes a wide field-of-view but with a very small aperture considering only chief rays), which limit the applications of these design methods.
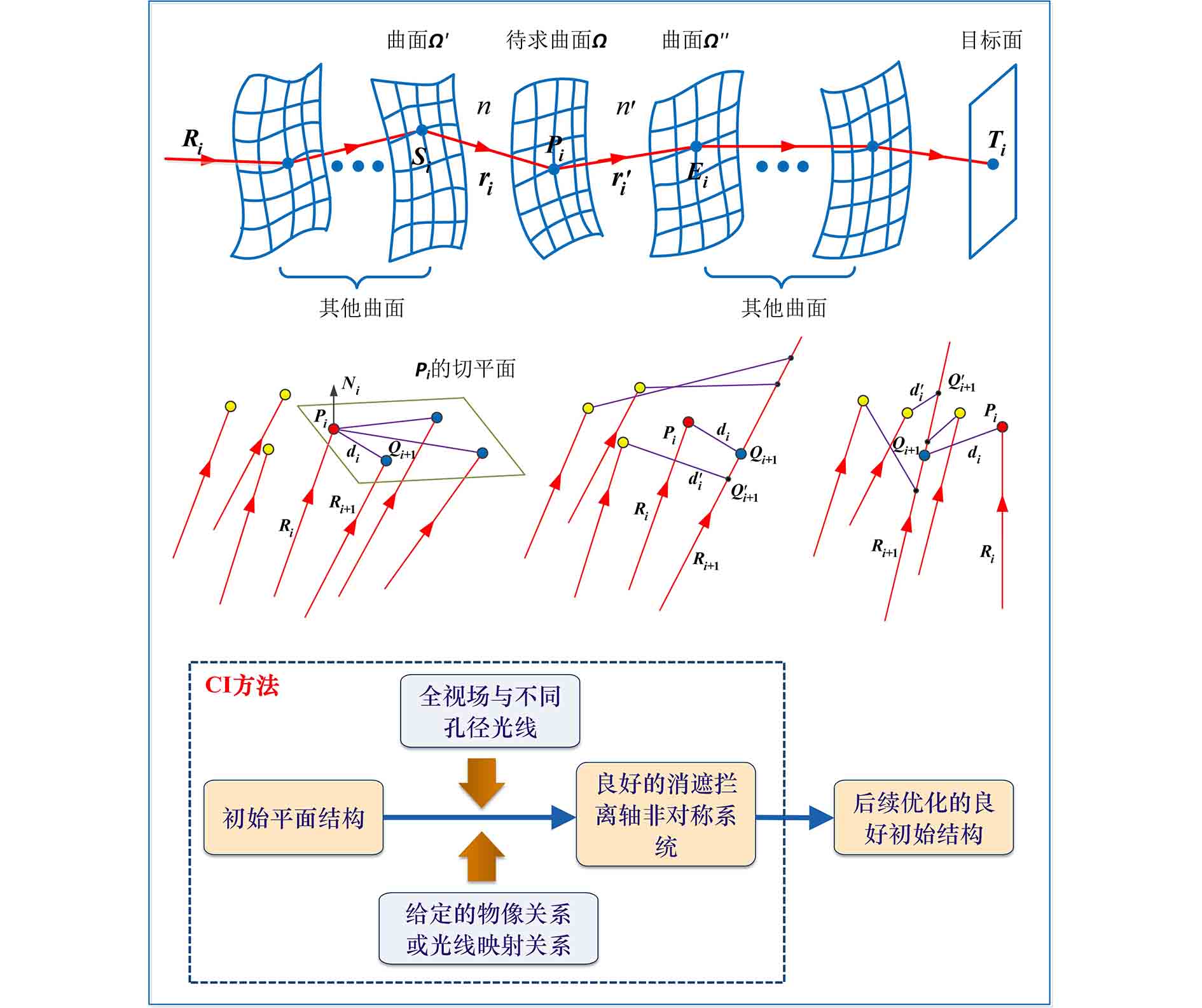
An actual imaging system should work for a certain object size and a certain width of light beam. Therefore, a basic requirement in freeform imaging system design is to control the light rays of multiple fields and different pupil coordinates. In addition, the design result should satisfy the given system specifications and configuration while eliminating obscuration. It is a challenge to design three-dimensional freeform surfaces under these conditions, but it is very important.
Our research group has proposed the point-by-point construction-iteration (CI) method for designing freeform imaging systems. This is, in some degree, a general point-by-point design method of freeform surfaces and freeform systems, and it can be used in the design of systems with low F-number, systems with rectangular FOV, systems with special configurations, etc. This method considers the light rays of multiple fields and different pupil coordinates. As a result, this method is suitable for designing general and actual imaging systems which work for a certain object size and a certain width of light beam. The design process starts from an initial system consisting of decentered and tilted planes. In the preliminary surfaces-construction stage, the coordinates as well as the surface normals of the data points on the freeform surface can be calculated point-by-point directly based on the given object-image relationships (or in a more general concept, a given mapping relationship). The freeform surfaces can be obtained through surface fitting. An iterative process is then employed to significantly improve the image quality or achieve a better mapping relationship of the light rays. The system can be taken as a good starting point for further optimization.